
Por

El propulsor New Shepard (NS) aterrizó después del quinto vuelo de este vehículo durante el NS-11 el 2 de mayo de 2019. Crédito: Blue Origin
Algunos de los lugares más interesantes para estudiar en nuestro sistema solar se encuentran en los entornos más inhóspitos, pero aterrizar en cualquier cuerpo planetario ya es una propuesta arriesgada. Con NASA planear misiones robóticas y tripuladas a nuevas ubicaciones en la Luna y marzoEvitar aterrizar en una pendiente pronunciada de un cráter o en un campo de rocas es esencial para garantizar un aterrizaje seguro para la exploración de la superficie de otros mundos. Para mejorar la seguridad del aterrizaje, la NASA está desarrollando y probando un conjunto de tecnologías precisas de aterrizaje y prevención de peligros.
Una combinación de sensores láser, una cámara, una computadora de alta velocidad y algoritmos sofisticados le darán a la nave los ojos artificiales y la capacidad analítica para encontrar una zona de aterrizaje designada, identificar peligros potenciales y ajustar el ruta al sitio de toma de contacto más seguro. Las tecnologías desarrolladas como parte del proyecto de Aterrizaje Seguro y Preciso – Evolución de Capacidades Integradas (SPLICE) como parte del programa de desarrollo revolucionario del Departamento de Misiones de Tecnología Espacial permitirán finalmente que las naves espaciales eviten las rocas, cráteres y más en zonas de aterrizaje que tienen la mitad del tamaño de un campo de fútbol ya señalado como relativamente seguro.
Un nuevo conjunto de tecnologías de aterrizaje lunar, llamado Safe and Precise Landing – Integrated Capabilities Evolution (SPLICE), permitirá aterrizajes lunares más seguros y precisos que nunca. Las futuras misiones de la Luna podrían utilizar los algoritmos y sensores avanzados SPLICE de la NASA para apuntar a sitios de aterrizaje que no fueron posibles durante las misiones Apolo, como áreas con rocas peligrosas y cráteres sombreados cercanos. Las tecnologías SPLICE también podrían ayudar a los humanos a aterrizar en Marte. Crédito: NASA
Tres de los cuatro subsistemas principales de SPLICE realizarán su primer vuelo de prueba integrado en un cohete Blue Origin New Shepard en una misión próxima. Cuando el propulsor del cohete regrese al suelo, después de alcanzar el límite entre la atmósfera y el espacio de la Tierra, la navegación relativa del terreno de SPLICE, la navegación Doppler lidar y la computadora de descenso y aterrizaje funcionarán en tablero del propulsor. Cada uno funcionará igual que cuando se acerque a la superficie de la Luna.
El cuarto componente principal de SPLICE, un lidar de detección de peligros, se probará en el futuro mediante pruebas en tierra y en vuelo.
Sigue el rastro de migas de pan
Cuando se elige un sitio para la exploración, parte de la consideración es garantizar el espacio suficiente para que aterrice una nave espacial. El tamaño del área, conocida como Landing Ellipse, revela la naturaleza inexacta de la tecnología de aterrizaje heredada. La zona de aterrizaje objetivo del Apolo 11 en 1968 era de aproximadamente 11 millas por 3 millas, y los astronautas pilotearon el módulo de aterrizaje. Las misiones robóticas posteriores a Marte fueron diseñadas para aterrizajes autónomos. Viking llegó al Planeta Rojo 10 años después con una elipse objetivo de 174 millas por 62 millas.
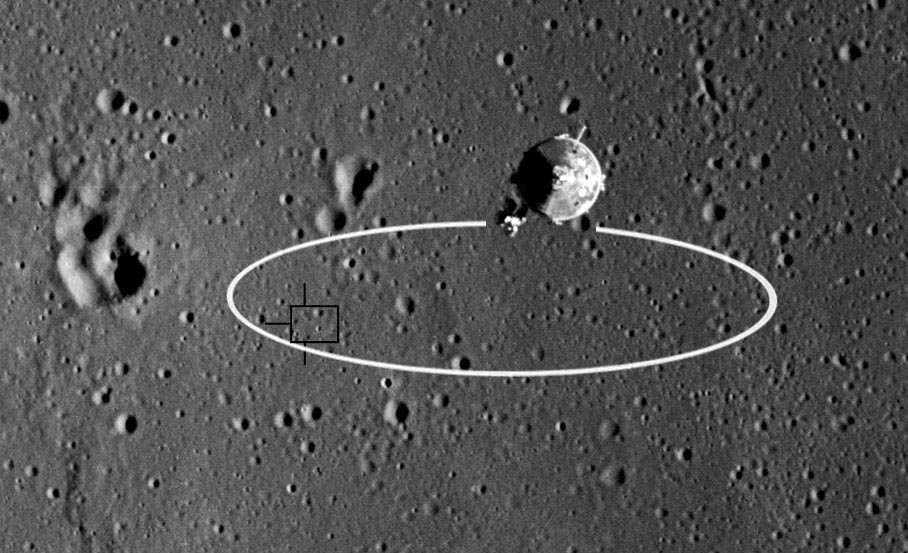
La elipse de aterrizaje del Apolo 11, que se muestra aquí, mide 11 millas por 3 millas. La tecnología de aterrizaje de precisión reducirá significativamente el área de aterrizaje, permitiendo que múltiples misiones aterricen en la misma región. Crédito: NASA
La tecnología mejoró y las subsiguientes zonas de aterrizaje autónomas se redujeron en tamaño. En 2012, la elipse de aterrizaje del rover Curiosity se redujo a 12 millas por 4 millas.
Ser capaz de localizar un lugar de aterrizaje ayudará a futuras misiones a apuntar a áreas para una mayor exploración científica en lugares que antes se consideraban demasiado peligrosos para un aterrizaje no tripulado. También permitirá que las misiones de suministro avanzadas envíen bienes y suministros a una ubicación, en lugar de abarcar millas.
Cada cuerpo planetario tiene sus propias condiciones únicas. Es por eso que “SPLICE está diseñado para integrarse con cualquier nave espacial que aterrice en un planeta o una luna”, dijo el gerente de proyecto Ron Sostaric. Con base en el Centro Espacial Johnson de la NASA en Houston, Sostaric dijo que el proyecto abarcó varios centros de agencias.
La navegación relativa al terreno proporciona una medida de navegación comparando imágenes en tiempo real con mapas conocidos de características de la superficie durante el descenso. Crédito: NASA
“Lo que estamos construyendo es un sistema completo de descenso y aterrizaje que funcionará para futuras misiones de Artemis a la Luna y se puede adaptar a Marte”, dijo. «Nuestro trabajo consiste en unir los componentes individuales y asegurarnos de que funcionan como un sistema en funcionamiento».
Las condiciones climáticas pueden variar, pero el proceso de descenso y aterrizaje es el mismo. La computadora SPLICE está programada para activar la navegación relativa al terreno a varios kilómetros del suelo. La cámara de a bordo fotografía la superficie, tomando hasta 10 fotos por segundo. Estos se introducen continuamente en la computadora, que está precargada con imágenes de satélite de la pista de aterrizaje y una base de datos de puntos de referencia conocidos.
Los algoritmos buscan en las imágenes en tiempo real características conocidas para determinar la ubicación de la nave espacial y dirigir la nave de manera segura hasta su punto de aterrizaje previsto. Es similar a navegar a través de puntos de referencia, como edificios, en lugar de nombres de calles.
Asimismo, la navegación por terreno identifica dónde se encuentra la nave espacial y envía esta información a la computadora de guía y control, que se encarga de ejecutar la trayectoria de vuelo hasta la superficie. La computadora sabrá aproximadamente cuándo la nave espacial debería estar acercándose a su objetivo, casi como si colocaran migas de alambre y luego las siguiera hasta el destino final.
Este proceso continúa hasta unas cuatro millas sobre la superficie.
Navegación laser
Conocer la posición exacta de una nave espacial es esencial para los cálculos necesarios para planificar y ejecutar un descenso motorizado para un aterrizaje preciso. A mitad del descenso, la computadora activa el lidar Doppler de navegación para medir las mediciones de velocidad y distancia que se suman a la información de navegación precisa de la navegación relativa del terreno. Lidar (detección de luz y rango) funciona de manera muy similar al radar, pero usa ondas de luz en lugar de ondas de radio. Tres rayos láser, cada uno tan estrecho como un lápiz, apuntan hacia el suelo. La luz de estos rayos rebota en la superficie y se refleja hacia la nave espacial.
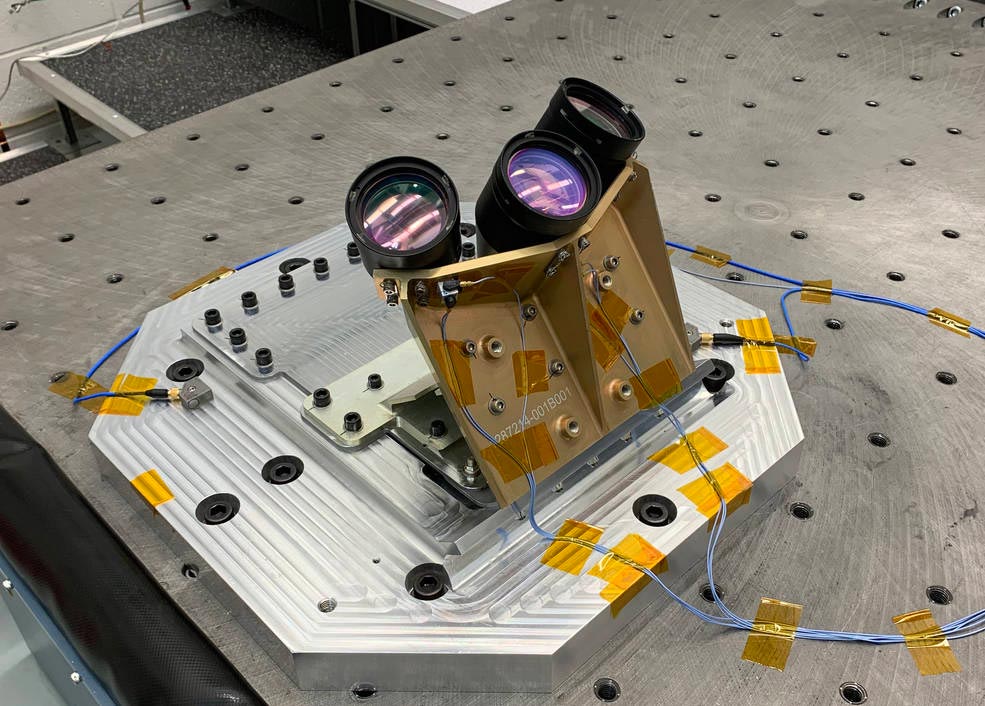
El instrumento lidar Doppler de navegación de la NASA consta de un chasis que contiene componentes electroópticos y electrónicos y un cabezal óptico con tres telescopios. Crédito: NASA
El tiempo de viaje y la longitud de onda de esta luz reflejada se utilizan para calcular qué tan lejos está la nave del suelo, en qué dirección se dirige y qué tan rápido se mueve. Estos cálculos se realizan 20 veces por segundo para los tres rayos láser y se introducen en la computadora de guía.
El lidar Doppler funciona con éxito en la Tierra. Sin embargo, Farzin Amzajerdian, co-inventor de la tecnología e investigador principal del Centro de Investigación Langley de la NASA en Hampton, Virginia, tiene la tarea de abordar los desafíos del uso en el espacio.
“Todavía hay incógnitas sobre la cantidad de señal proveniente de la superficie de la Luna y Marte”, dijo. Si el material en el suelo no es muy reflectante, la señal devuelta a los sensores será más débil. Pero Amzajerdian está convencido de que el lidar superará a la tecnología de radar porque la frecuencia del láser es un orden de magnitud mayor que las ondas de radio, lo que resulta en una precisión mucho mayor y una detección más eficiente.
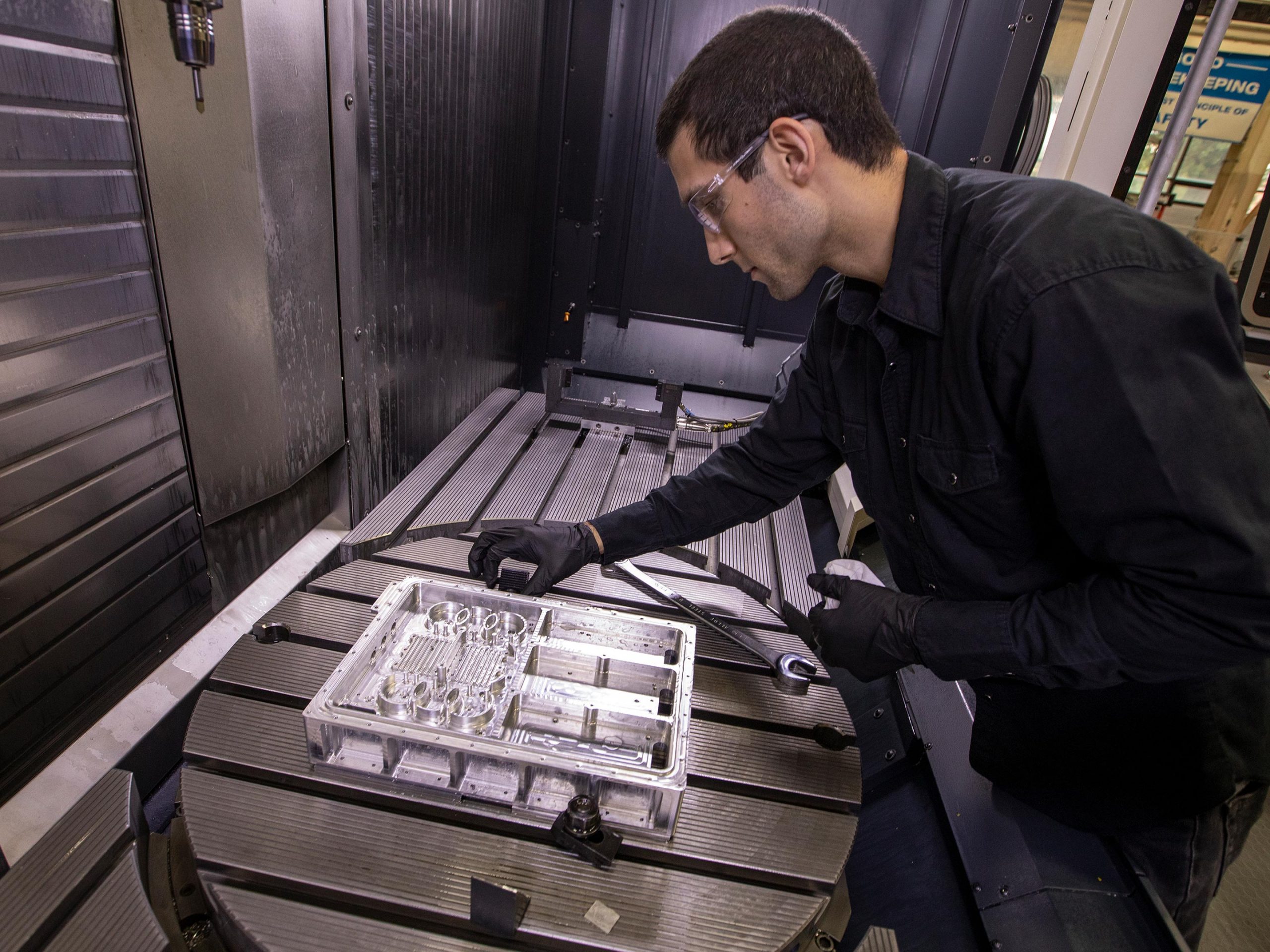
El ingeniero de Langley, John Savage, inspecciona una sección de la unidad lidar Doppler de navegación después de haber sido fabricada a partir de un bloque de metal. Crédito: NASA / David C. Bowman
El caballo de batalla responsable de administrar todos estos datos es la computadora de descenso y aterrizaje. Los datos de navegación de los sistemas de sensores se transmiten a algoritmos a bordo, que calculan nuevos carriles para un aterrizaje preciso.
Centro de Computación
El ordenador de descenso y aterrizaje sincroniza las funciones y la gestión de datos de los distintos componentes de SPLICE. También debe integrarse a la perfección con otros sistemas de cualquier nave espacial. Por lo tanto, este pequeño centro de datos evita que las tecnologías de aterrizaje de precisión sobrecarguen la computadora de vuelo principal.
Las necesidades de TI identificadas desde el principio dejaron en claro que las computadoras existentes eran inadecuadas. El procesador de computadora de alto rendimiento de la NASA para vuelos espaciales satisfaría la demanda, pero aún quedan varios años por completar. Se necesitaba una solución provisional para preparar SPLICE para su primera prueba de vuelo con cohete suborbital con Blue Origin en su cohete New Shepard. Los datos del rendimiento de la nueva computadora ayudarán a dar forma a su eventual reemplazo.
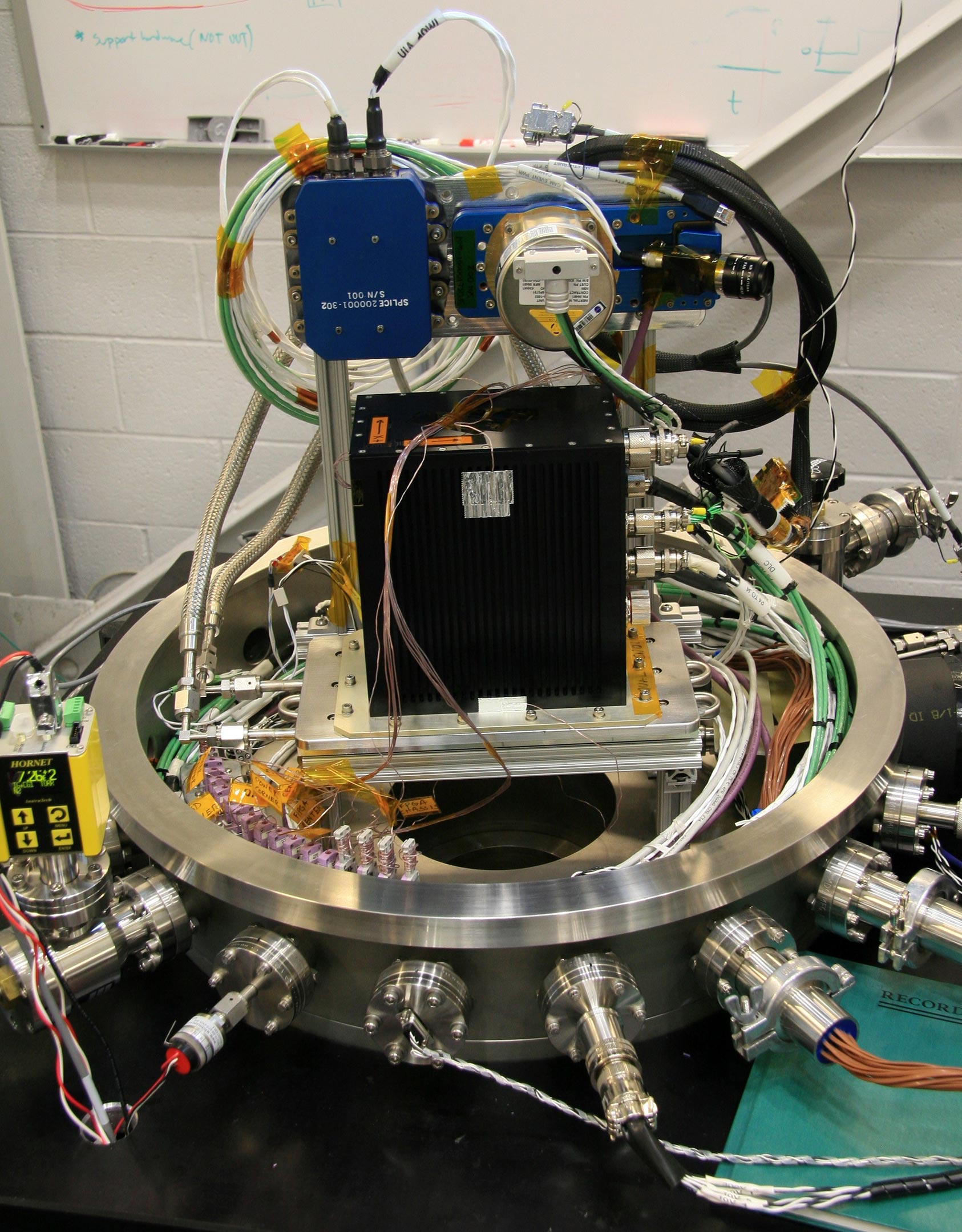
Equipo SPLICE en preparación para una prueba de cámara de vacío. Tres de los cuatro subsistemas principales de SPLICE tendrán su primer vuelo de prueba integrado en un cohete Blue Origin New Shepard. Crédito: NASA
John Carson, gerente de integración técnica de Precision Landing, explicó que “la computadora sustituta tiene una tecnología de procesamiento muy similar, que informa el diseño futuro de la computadora de alta velocidad, así como los esfuerzos futuros para integrar computadoras de descenso y aterrizaje «.
En el futuro, misiones de prueba como estas ayudarán a configurar sistemas de aterrizaje seguros para la NASA y las misiones de proveedores comerciales a la superficie de la Luna y otros cuerpos del sistema solar.
«Aterrizar de forma segura y precisa en otro mundo todavía plantea muchos desafíos», dijo Carson. “No hay ninguna tecnología comercial que puedas comprar para esto todavía. Cada misión de superficie futura podría utilizar esta capacidad de aterrizaje de precisión, por lo que la reunión de la NASA la necesita ahora. Y fomentamos la transferencia y el uso con nuestros socios industriales. «

Paco Varas es colaborador de Lagradona.com y se dedica a cubrir temas de actualidad, incluyendo noticias, política, negocios, tecnología, deportes, entretenimiento y estilo de vida. Su enfoque está en ofrecer información clara, precisa y fácil de entender, ayudando a los lectores a mantenerse al día con los acontecimientos más relevantes. A través de una cobertura equilibrada y orientada al público, busca destacar historias de interés y proporcionar contenido útil y actualizado para una audiencia diversa.
También te puede interesar
-
Las imágenes inéditas de Artemis II que la NASA convierte ahora en fondos de pantalla para móviles
-
Artemis II: los 40 minutos críticos en los que la tripulación perderá contacto con la Tierra al rodear la Luna
-
Científicos logran cultivar garbanzos en suelo lunar simulado
-
El cohete SpaceX explota en el impacto después del vuelo de prueba, Musk todavía declara su éxito
-
Mike Pence anuncia nuevo cuadro de astronautas lunares en su última reunión del consejo espacial